
TUTORIAL Come creare un controller template in RobotStudio per lo YUMI ABB 14000 con tutte le istruzioni necessarie
In questo video introduttivo alla programmazione dello YUMI ABB 14000, vediamo come configurare un Controllore template contente tutte le istruzioni necessarie per la programmazione del robot e delle “manine” Spoart_gripper_servo con tutte le funzioni disponibili sull’utensile.
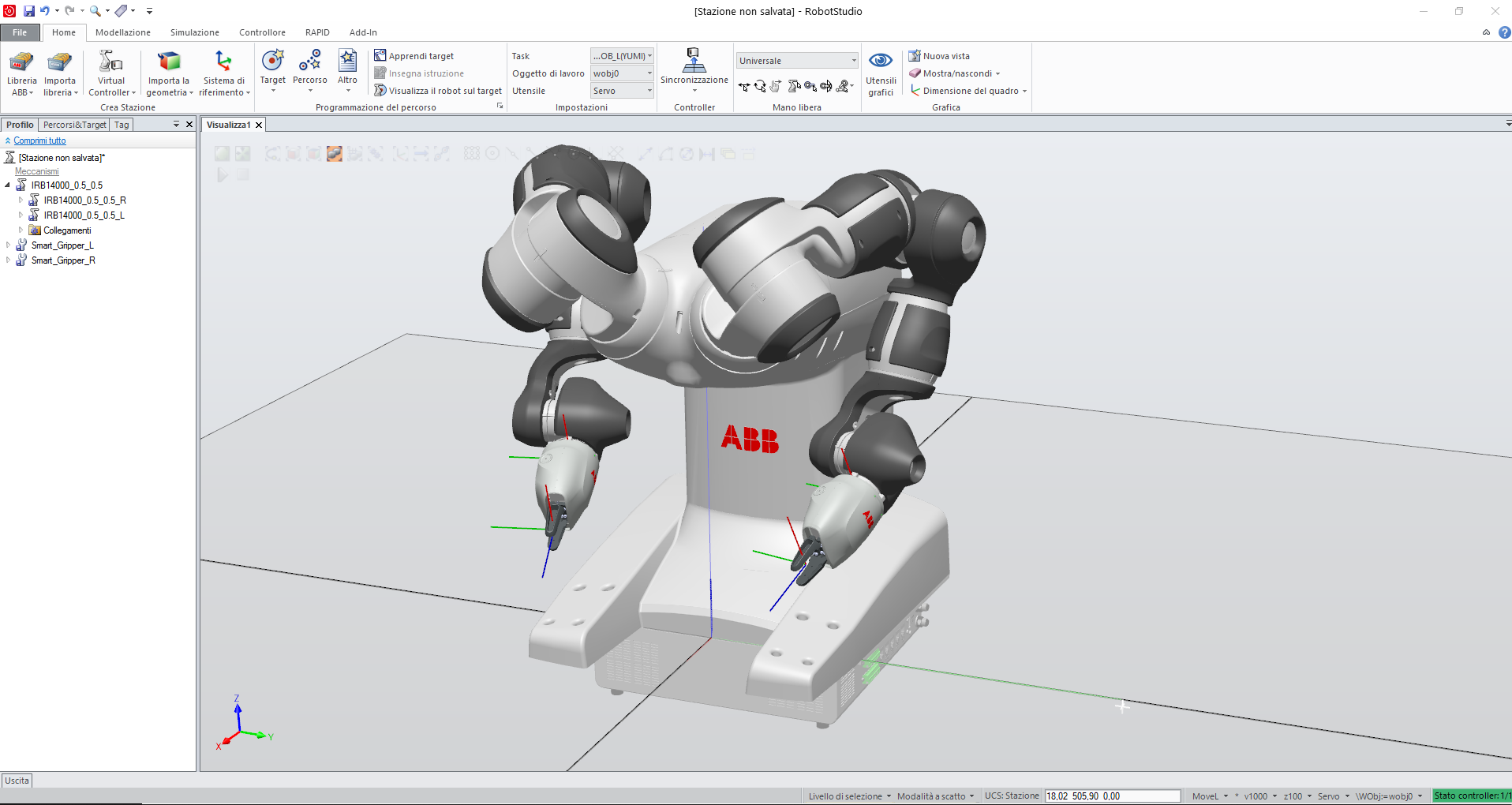
I controllori da profilo, non contengono tante istruzioni necessarie per la programmazione delle manine del robot, pertanto è necessario, per averle disponibili nel RAPID, andare ad attivarle, e per comodità ci creiamo un controllore di base da cui partire per tutti i nostri esercizi successivi.
Buon lavoro!
SOFTWARE NECESSARI:







