
ESEMPIO APPLICATIVO: Programmazione robot da Tia Portal – SIMATIC Robot Integrator per robot KUKA mediante GSD – Getting Started
I robot industriali stanno diventando sempre più popolari. Oggigiorno vengono impiegati in maniera massiccia in macchinari e impianti. Il loro impianto meccanico standardizzato, sofisticato e altamente flessibile nei possibili movimenti promuove con sempre maggiore frequenza l’impiego di un robot rispetto a un costoso impianto meccanico speciale. È così possibile anche una produzione di lotti a partire da pezzi unici senza costose modifiche su macchine e impianti.
Purtroppo si tratta tuttavia di norma di due sistemi differenti per il controllore dell’impianto e il robot controller. La comunicazione tra i due controllori ha luogo principalmente soltanto sul piano bit e i programmi di movimento del robot sono archiviati fissi sul robot controller e possono essere soltanto richiamati dal controllore dell’impianto. Una reazione flessibile del robot a speciali eventi degli impianti è pertanto difficilmente realizzabile. La programmazione del controllore dell’impianto e del robot si differenzia fortemente e quindi la gestione dei due sistemi non può essere eseguita di norma da una persona. Pertanto sono prevedibili sin dall’inizio problemi di interfaccia e sintonizzazione.
Questo esempio applicativo mostra come un robot industriale KUKA può essere completamente controllato e azionato tramite un controllore SIMATIC S7-1500. A tale scopo si impiega la libreria di blocchi KUKA.PLC mxAutomation nel TIA Portal, che predispone tutti i blocchi funzionali necessari a tale scopo.
La comunicazione tra il controllore SIMATIC S7-1500 e il robot industriale KUKA è affidata a una connessione PROFINET. Tramite questa connessione tutti i comandi e le informazioni di stato vengono scambiati tra il controllore SIMATIC e il robot.
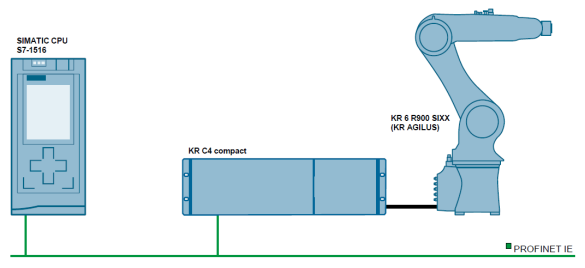
Figura 1
SIMATIC-S7-1516 assume il comando completo del robot industriale KUKA tramite la libreria di blocchi KUKA.PLC mxAutomation. Il robot industriale KUKA si compone del controller per robot KUKA KR C4 e l’impianto meccanico del robot, il robot vero e proprio. Sul controllore per robot è installato l’interprete per i comandi della libreria di blocchi KUKA.PLC mxAutomation. L’interprete accetta i comandi del controllore SIMATIC e li esegue, incluse le trasformazioni della cinematica, sulla meccanica del robot.
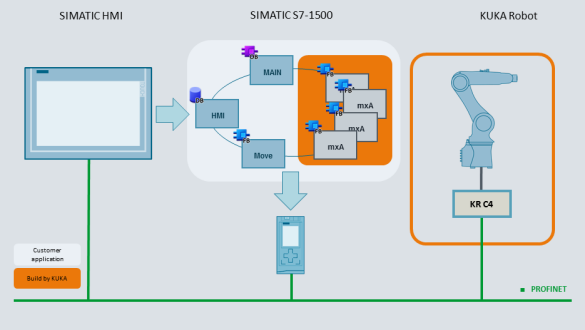
Figura 2
è possibile scaricare di seguito l’esempio applicativo per TiaPortal V16 con documentazione.
ATTENZIONE: Questo esempio applicativo messo a disposizione da Siemens AG utilizza la libreria protetta TIA KUKA. Tutti i diritti della libreria TIA KUKA sono riservati a KUKA Deutschland GmbH. Non è consentito modificare o intervenire sulla libreria TIA KUKA.
Software necessari:
Ricordo che per essere abilitati al download del software è necessaria una registrazione al sito di supporto Siemens (qui) ed una successiva autorizzazione da parte di Siemens, che può richiedere anche diversi giorni.







